Simulation-based optimization of active suspension control.
Fuzzy control systems, Pareto optimization, genetic algorithms
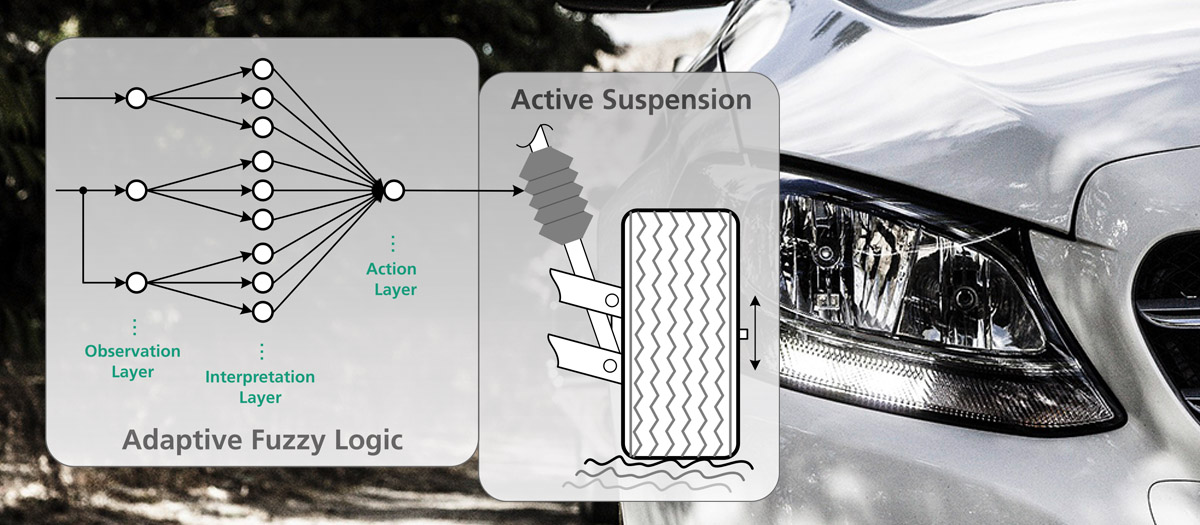
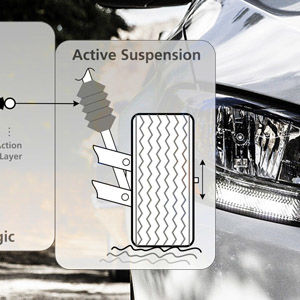
The integration of active suspensions allows for the real-time adaptation of the vehicle's behavior with respect to the current driving condition and the selected driving mode. The purpose of the suspension system is to ensure contact with the road while fulfilling the requirements for ride comfort at the same time. High driving safety combined with simultaneous driving comfort can be achieved by using semi-active controlled suspension systems. The availability of highly accurate simulation models of the vehicle and its components motivates the use of simulation-based controller design methods based on genetic algorithms.
Use of genetic algorithms
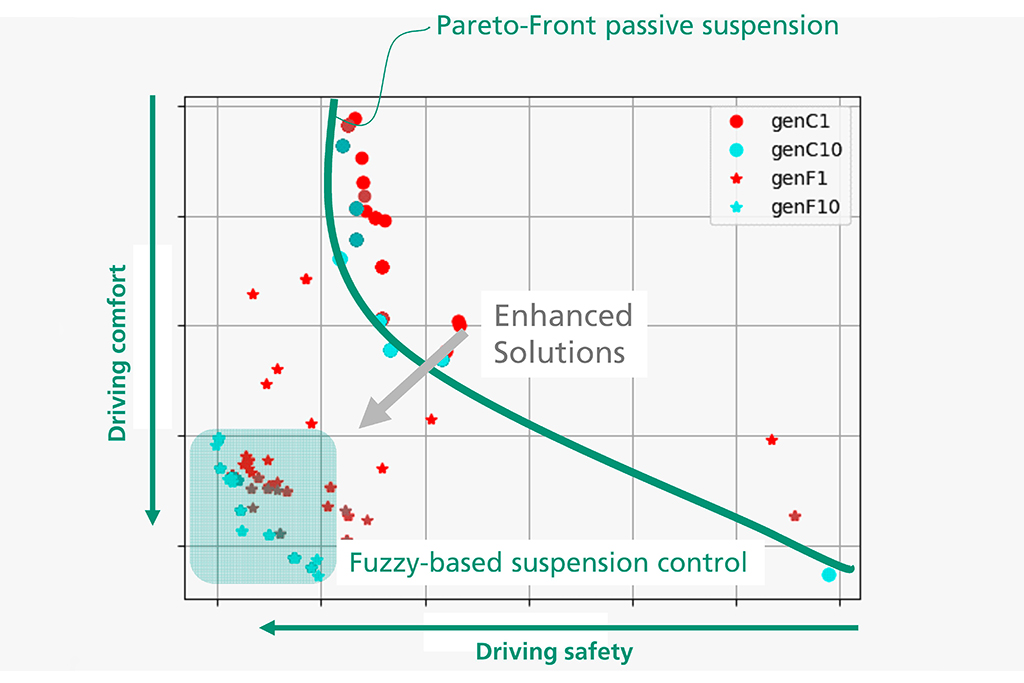
Genetic algorithms are used in a variety of fields. Due to the complex, mutual requirements in the system design, mechatronic systems will especially benefit from these metaheuristic optimization methods in the future. A parameter configuration for a given problem is artificially derived from evolutionary computation and population-based metaheuristic optimization. In the application case at hand, this method was applied at Fraunhofer LBF to the optimization of a fuzzy-based active suspension control system. At the same time, the process accounts for a target function for optimizing driving safety as well as an objective function for optimizing driving comfort.
Fuzzy-based control algorithms
The actual control structure is implemented within three different levels: The first layer involves the observation of incoming sensor signals and the extraction of specific features. The detected features are used to characterize and evaluate the current driving condition. In the third control layer, an optimal control signal is calculated.
Simulation-based optimization
For the project, experts at Fraunhofer LBF have implemented a simulation of the complete vehicle system with semi-active dampers in the Matlab/Simulink software. In addition to a virtual driver, changing road surfaces were also integrated. Beside a non-linear multi-body simulation of the chassis and a tire model, the vehicle model also includes the structural dynamics of the vehicle body in the form of a reduced order finite element model. The components of the suspension structure with semi-active shock absorption were modeled as lumped parameter models. For the actual optimization of the control parameters, the scientists implemented an adapted genetic algorithm in the programming language Python. To evaluate the target functions of the given parameter configurations of a generation, the Python program starts several Matlab instances. Thus, the optimization time can be significantly reduced by a parallel calculation. In the next program step, good solutions are automatically selected and another generation is created through recombination and mutation. Taking into account physical limitations, the program stops as soon as the target requirement with regard to driving safety and ride comfort has been optimally set.
Customer benefits
In contrast to a model-based control design, the developed method for simulation-based optimization can be used flexibly, does not rely on an additional model of the controlled system, and the control structure can be freely selected – with many parameters, same as with the fuzzy control system. Furthermore, the internal structure of the controlled system does not need to be known for the simulation-based control design, and confidential models or black box models can be considered in the design. The devised process can be used during the development phase at an early stage of product development and will be automated when the requirements or model change to accommodate an updated control system design. The flexibility of the method also allows for adaptation of the target functions or the consideration of additional optimization criteria, such as the mechatronic system parameters.
The project was funded by Fraunhofer LBF as part of the research project ”Digitalization in Testing Technology”.

“The availability of high-precision simulation models associated with increasing digitalization enables a simulation-based control design. Perspectively, it allows the integration of highly functional control system structures and minimizes the effort of time-consuming attempts to derive parameters on a real vehicle.” Jonathan Millitzer M.Sc., Group Manager Active Control at Fraunhofer LBF.
Contact
- Dipl.-Ing. Louis Balzer
- Phone: +49 6151 705-417
- louis.balzer@lbf.fraunhofer.de